Motoren und Hindernissensor kalibrieren
1. Motorenkalibrierung
Es ist unter Umständen notwendig, den Edison vor Gebrauch zu kalibrieren. Tipp: Wenn der Edison bei Drehungen zu ungenau ist, reduziere die Motorengeschwindigkeit während der Drehung. Der Hersteller bietet zwei Kalibrierungsmöglichkeiten an. Beide Kalibrierungen werden mit Hilfe von Barcodes durchgeführt. Die wichtigste Kalibrierung stellt dabei die Kalibrierung der Motoren dar. Die zweite Kalibrierung ist wichtig für die Hinderniserkennung und wird in diesem Moodlekurs etwas später noch einmal wiederholt.
Vorgehen Motorkalibrierung:
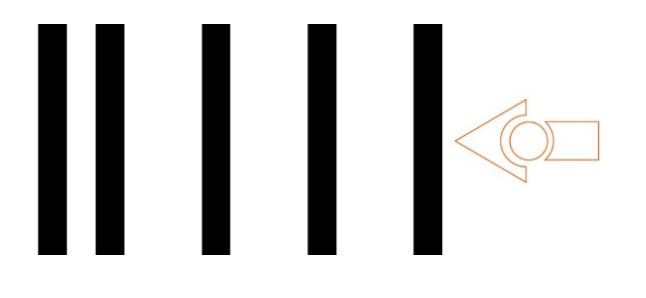
Lass den Edison den folgenden Code scannen. Dazu stellst Du ihn auf den orangenen Pfeil und drückst dreimal die runde Taste auf der Oberseite des Edsions.
Anschließend wird die Playtaste (dreieckig) an der Oberseite des Edisons zweimal gedrückt.
Der Edison fährt jetzt 10x vor und zurück
2. Hinderniserkennung kalibrieren
Je nach Aufgabenstellung muss der Edison Hindernisse frühzeitiger erkennen können.
Mithilfe der Hinderniserkennung haben wir bereits im Zusammenhang mit den Strichcodes gearbeitet. Wir können die Sensoren aber auch in der Programmieroberfläche nutzen. Dabei ist zu beachten, dass die Fernbedienung bei Aktivierung der Hinderniserkennung nicht verwendet werden kann.
Zunächst kann man die Empfindlichkeit der Sensoren einstellen. Wenn sie empfindlicher eingestellt werden, kann Edison Hindernisse weiter weg erkennen. Wenn sie unempfindlicher gemacht werden, sieht er nur ganz nahe Hindernisse. Den folgenden Strichcode scannt man ein:

Drücke nun die dreieckige Start-Taste. Edison ist nun im Einstell-Modus. Entferne alle Gegenstände, die vor Edison liegen. Positioniere dann einen Gegenstand in der gewünschten Entfernung zum Edison. Tipp: Der Gegenstand sollte weder weiß, noch schwarz sein. Das Hindernis sollte ca. 10 bis 15cm hoch und nicht zu schmal sein. Vermeide einfallendes Sonnenlicht, da dieses den Sensor beeinträchtigt.
Um die Empfindlichkeit Die Empfindlichkeit nach vorne links wird zuerst eingestellt.Drücke wiederholt die dreieckige Start-Taste (erhöht die Empfindlichkeit) bis die linke rote LED flackert.
Drücke wiederholt die runde Programmier-Taste (vermindert die Empfindlichkeit) bis die LED nicht mehr flackert.
Drücke die viereckige Stopp-Taste um anschliessend die rechte Seite einzustellen.
Drücke wiederholt die Start-Taste bis die rechte rote LED flackert. Dann drücke wiederholt die Programmier-Taste bis die LED nicht mehr flackert.
Drücke die Stopp-Taste und die Einstellung wird gespeichert.
Der folgende Link verweist auf die entsprechende Seite des EdisonBuch 2. Diese Seite kannst Du für die Kalibrierung ausdrucken.
Fortgeschrittene können den Hindernissensor mit Hilfe der Editoren programmieren. Dabei gibt es zwei Dinge zu beachten:1. Nutzt man einen "Fahren"-Baustein mit vorgegebener Entfernung, dann wird der Hindernissensor deaktiviert.
2. Der Hindernissensor kann Hindernisse vorne, rechts und links erkennen. Das gibt einen größeren Gestaltungsspielraum beim Programmieren.
3. Programmierung Hinderniserkennung
Anfänger können das vorgefertigte Programm zur Hinderniserkennung verwenden, welches im Kapitel "Programmierung Strichcodes" vorgestellt wurde. ACHTUNG!! Bitte Link setzen!
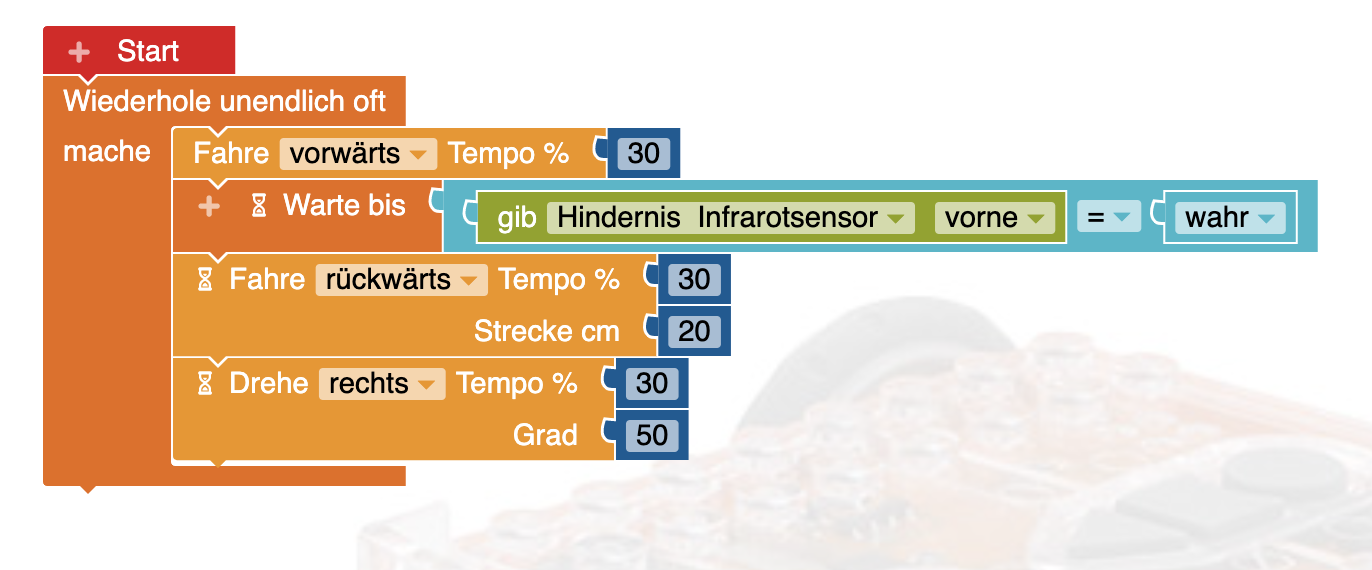
Fortgeschrittene programmieren ihn z.B. über openroberta.lab selbst. Die Blockprogrammierung würde wie folgt ausschauen:
Die Strichcodes und Anleitungen vom roboclub können über den folgenden Link herunterladen:
https://openelec.moodle-nds.de/pluginfile.php/10557/mod_page/content/21/Edison_Kalibrierung.pdf