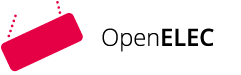
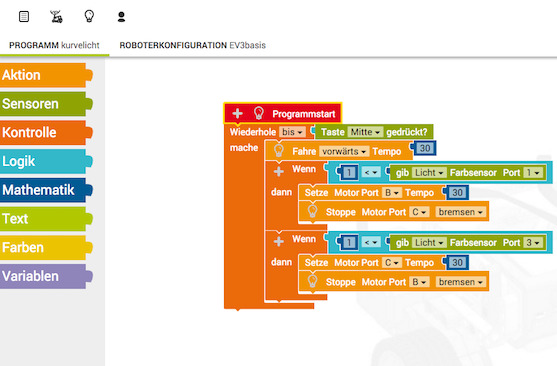
Ein Roboter soll einen vorgegebenen Weg abfahren.
Um ein Werkstück zu fertigen sind Koordinaten von Punkten,
Längen von Strecken und Winkel zu ermitteln.
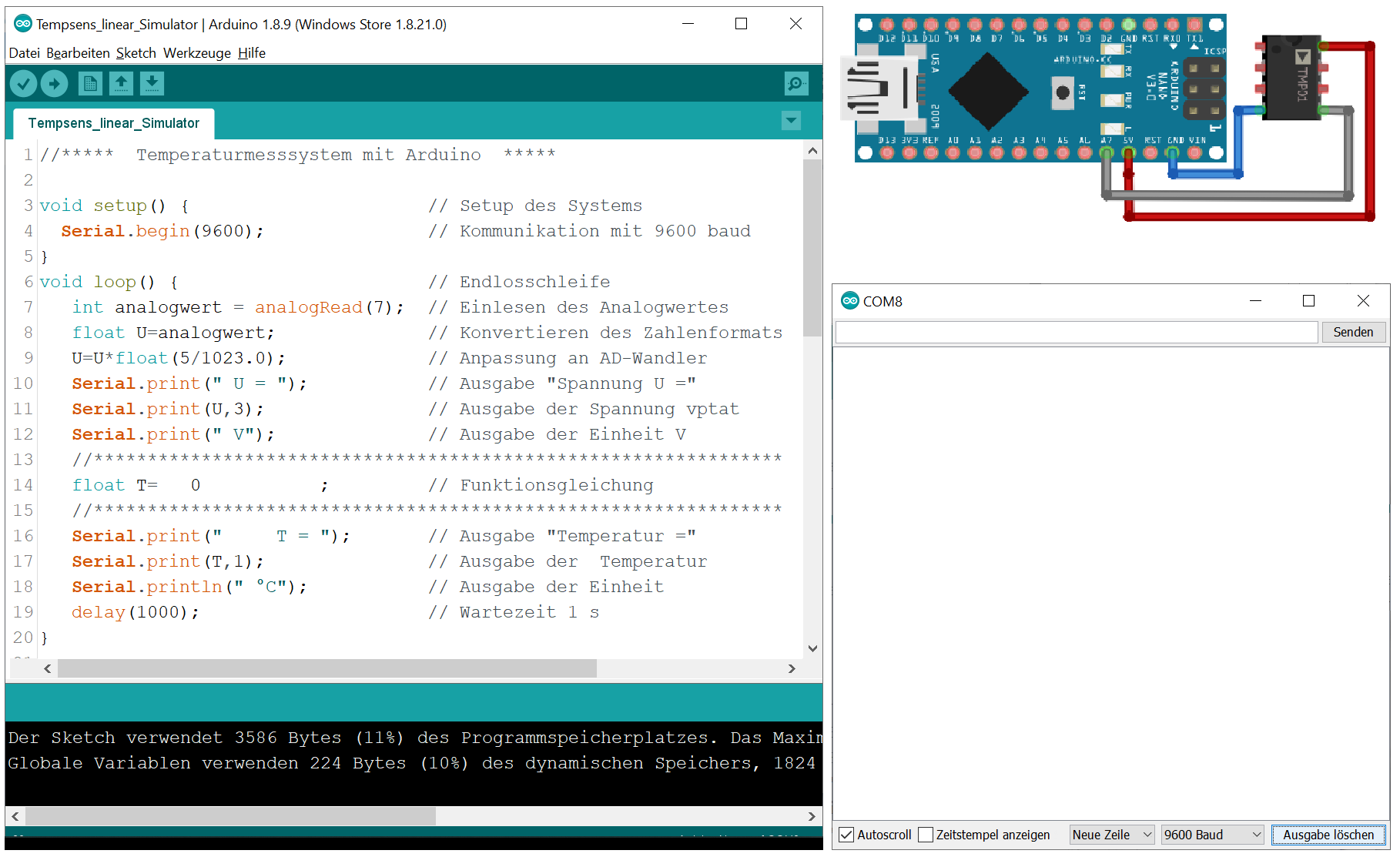
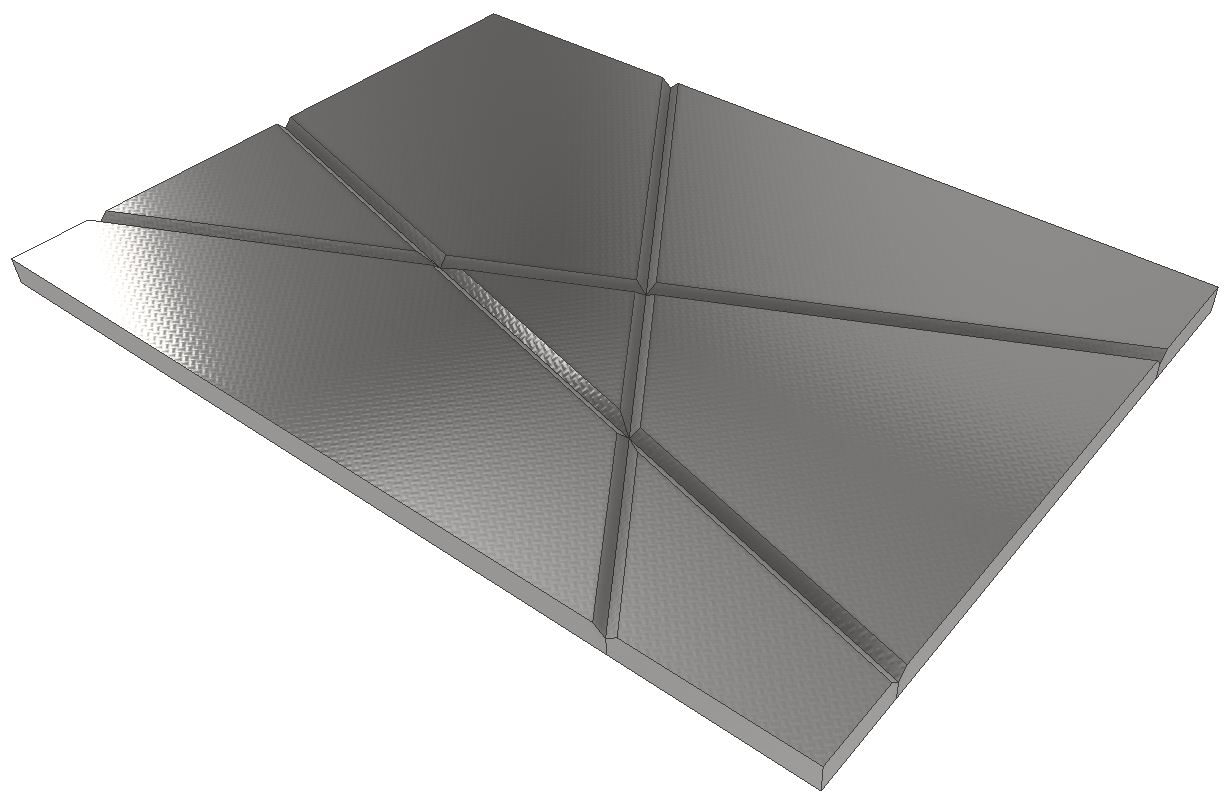
Um ein Temperaturmesssystem in Betrieb zu nehmen, soll eine Zuordnung
Temperatur-Spannung ermittelt und programmiert werden.